Bármiféle autonóm repülés talán legfontosabb információja a repülőgép abszolút térbeli helyének, de még inkább helyzetének meghatározása. Térbeli hely alatt ezután a repülőgép valamilyen földi vonatkozási rendszerhez viszonyított eltolását értjük (hogy ne bonyolítsuk túl: „hol vagyok a térképen és mi a magasságom?”), helyzet (ha tetszik, tájolás) alatt pedig a repülőgép ugyanazon vonatkozási rendszerhez viszonyított elfordulását értjük innentől (egyszerűbben: „merre áll a gép orra és szárnyai az északi irányhoz és a vízszinteshez képest?”).
Bár ez a két információ szorosan összefügg (és együttesen írja le a repülőgép mozgását), nem véletlenül választottuk szét őket. A megkülönböztetés nem csak azért indokolt, mert jelentős fontossági eltérés van a két információ között (ti. sokkal kevésbé fáj, ha nem tudom, hol vagyok a térképen, mintha gőzöm sincs, merre áll a gép orra), de azt is látni fogjuk, hogy a két információt egészen eltérő módszerekkel fogjuk összegyűjteni.
Egy legegyszerűbb, klasszikus összeállítású inerciális/tehetetlenségi navigációs rendszer (Inertial Navigation System, INS) két műszerből áll: egy (térbeli) lineáris gyorsulásmérőből és egy (térbeli) szögelfordulás-mérőből. A két műszer pontosan az előbbiek mentén „vágja ketté” a hely- és helyzetmeghatározás feladatát: a gyorsulásmérő feladata a térbeli elmozdulás, a szögelfordulás-mérőé pedig a térbeli elfordulás meghatározása.
Belátható, hogy legalább a helyzetinformáció (a térbeli elfordulás) szükséges a legegyszerűbb önálló repüléshez is – hiszen hogyan is tudnánk vízszintesen repülni, ha fogalmunk sincs róla, hogyan állunk a vízszinteshez képest. Hagyjuk most egyelőre a térbeli helyet (és a lineáris gyorsulásmérőt), nézzük meg, milyen módszerekkel tudjuk egy repülőgép helyzetét meghatározni (még egyszer és utoljára: a repülőgép fő tengelyeinek irányát a vízszinteshez és az északi irányhoz képest).
Az iránymeghatározás hagyományos műszere az ún. három szabadságfokú (Degrees of Freedom, DOF) pörgettyű vagy giroszkóp. Pörgettyűnek egy szimmetriatengelye körül megfelelően gyors mozgást végző merev testet nevezünk. Alkalmazására annak a jelenségnek a megfigyelése vezetett, hogy egy ilyen forgástest igyekszik megtartani (szimmetria)tengelyének abszolút helyzetét. Ha ezt a tengelyt felfüggesztjük egy, az ábrán látható ún. kardanikus keretrendszerre (három koncentrikus keret, ahol a felfüggesztések sorra 90°-ot zárnak be egymással és mindhárom tengely vonala átmegy a pörgettyű tömegközéppontján), akkor a repülőgép (amihez a legkülső keret rögzítve van) bármilyen elfordulása esetén is a pörgettyű tartani fogja eredeti helyzetét, hiszen bármilyen forgatónyomaték ébredésére a keretek fognak a tengelyek körül elfordulni, és a pörgettyű erőmentes marad.
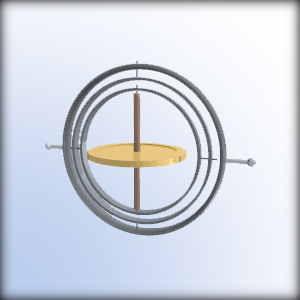
A három tengelyen mért elfordulás sorra megadja a térbeli elfordulást leíró három ún. Euler-szöget (az Euler-szögekről később még nagyon sok szó lesz).
Két dolgot kell megjegyeznünk a pörgettyűs iránymeghatározással kapcsolatban: az első, hogy abszolút irányokat természetesen csak abban az esetben kapunk, ha indítás előtt a vonatkozási rendszerünkhöz igazítjuk a pörgettyű tengelyeit; a másik pedig, hogy a mérést terhelő hibahatások (leginkább a keretrendszer szerkezeti pontatlanságaiból adódóak) az idő során folyamatosan összeadódnak, kumulálódnak, egyre jobban és jobban elrontva ezzel a mérés pontosságát.
Bár a pörgettyű azóta is kiválóan teljesít szolgálatot a repülőgépek fedélzetén (ma már inkább csak tartalékrendszerként), modellrepülőgépben alkalmazhatósága meglehetősen csekély: a kellő pontosság eléréséhez ugyanis a pörgettyű tehetetlenségi nyomatékának kellően nagynak kell lennie (sok-sok kilogramm tömeg és több ezer fordulat/perc forgási sebesség) – így szerintem ezen tovább már nem is kell gondolkodnunk.
Természetesen a pörgettyűn kívül létezik még más fizikai módszer a szögsebesség mérésére, pl. egy fényvezető keretben két, egymással ellentétes irányban keringő lézersugár interferenciáját mérő lézergiroszkóp, de ezek az eszközök még mindig túl nagyok és nehezek (és főleg nagyon drágák) ahhoz, hogy érdemben használni tudjuk őket.
Szerencsénkre a mikroelektronika és a nanotechnológia 1990-es évek eleje óta tartó robbanásszerű fejlődése teljesen új korszakot indított az inerciális (tehetetlenségi) szenzorok világában. A két technológia házasságából születtek meg az ún. mikroelektro-mechanikai rendszerek (Microelectromechanical systems, MEMS); a nagy áttörést az jelentette, hogy a parányi integrált áramkörök mellé képessé váltunk alig néhány mikron méretű mozgó mechanikus alkatrészeket is építeni.
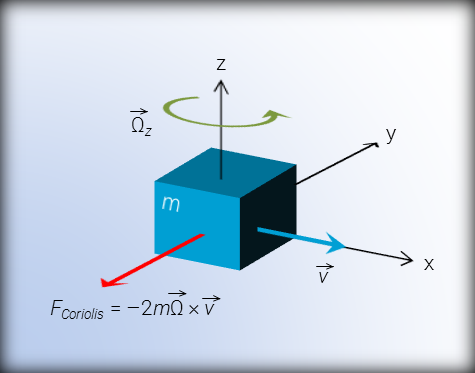
Egy MEMS-giroszkóp működési elve eltér a hagyományos módszerektől: bár sokféle szerkezeti kialakítás létezik, a legtöbb módszer az ún. Coriolis-gyorsulás fizikai jelenségét hívja segítségül. Az összefüggés kimondja (nagyon leegyszerűsítve), hogy egy m tömegű testet v sebességgel mozgatva, és a mozgás irányára merőleges tengely körül Ω szögsebességgel megforgatva, a tömeggel, a sebességgel és a szögsebességgel arányos erő ébred (ez a Coriolis-erő) egy mindkét tengelyre merőleges irányban. Ha az m tömeget és a v sebességet ismertnek tekintjük, az F erő mérésével az Ω szögsebesség meghatározható.
A mérés a gyakorlatban úgy oldható meg, hogy egy apró, rugókkal felfüggesztett ismert tömegű testet rezegtetünk ide-oda egy adott irány mentén, közben a megfelelő időpontban megmérjük a test a mozgás tengelyére merőleges elmozdulását, ebből pedig a szögsebesség már számítható. Természetesen egy ilyen elrendezés a teljes térbeli elfordulásnak csak a vibráció és a mérés tengelyére merőleges komponensét adja meg, így a teljes térbeli szögsebesség (és -elfordulás) leírásához három ilyen szerkezetre van szükség, értelemszerűen egymásra merőleges irányokban elrendezve.
Kicsit talán zavaró, hogy hol szögelfordulásról, hol szögsebességről beszélünk, de természetesen a két dolog szorosan összefügg: a szögelfordulást a szögsebesség idő szerinti integrálásával kapjuk, vagy egyszerűbben, ha az utolsó szögelfordulásunkhoz mindig hozzáadjuk a mért szögsebesség és a megelőző mérés óta eltelt idő szorzatát. Ennek megfelelően a szögsebességet mérő MEMS-giroszkópnak is sajátja a mérési hiba folyamatos halmozódása.
Elektronmikroszkóp alatt így néz ki egy ún. fésűs-hangvillás kialakítású MEMS-giroszkóp (a teljes képen látható szerkezetet el tudnánk takarni négy, egymás mellé lefektetett emberi hajszállal):
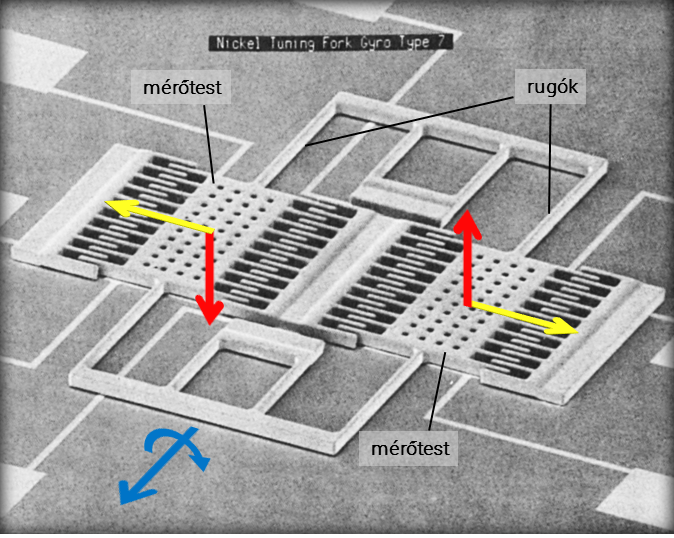
Forrás: http://www.invensense.com/mems/gyro/documents/whitepapers/MEMSGyroComp.pdf
Hogy kicsit érthetőbb legyen, nyilakkal jelöltem a mozgások irányát: a sárga nyilak jelzik a mozgatás, vibráltatás irányát (itt éppen kifelé), a kék vektor jelzi a szögsebesség vektorát, a piros nyilak pedig az ébredő Coriolis-erő miatt fellépő elmozdulást – ezt a mérőtestek alatt elhelyezett kapacitív elektródák mérik. A vibráció ellentett irányának ábráját (amikor a testek egymás felé mozdulnak) könnyű előállítani, csak a piros és sárga nyilak irányát kell megfordítani. A rezgés frekvenciája jellemzően 4-5 kHz; a kettős (differenciális) kialakítás pedig lehetővé teszi, hogy a lineáris gyorsulás hatása ne befolyásolja a mérést.
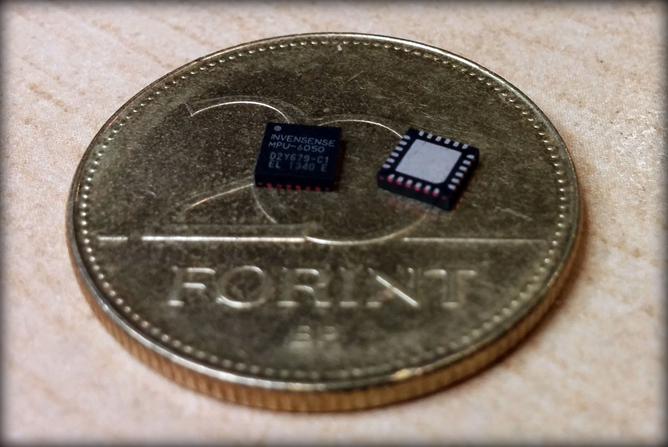
Ezeket a mérőszerkezeteket végül a kiegészítő elektronikai elemekkel együtt egy hagyományos integrált áramköri tokba teszik (csip). Két egyforma ilyen csip látható a képen (ezekbe a giroszkóp három szenzora mellé még más szenzorokat is beépítettek), egy csip teljes mérete 4x4x1 mm, a tömege ennek megfelelően elhanyagolható, áramfelvétele 1 mA, az ára pedig Kínából megrendelve magyarországi szállítással 442.- Ft. Kedvező tulajdonságai (főleg parányi mérete) lehetővé tette, hogy mára olyan helyeken is számolhassunk a tehetetlenségi jelenségekkel, ahol korábban elképzelni sem tudtuk volna: így kerültek ilyen szenzorok mobiltelefonokba, közlekedésbiztonsági rendszerekbe, játékokba vagy (akár) modellrepülőgépekbe.
Pici, könnyű, olcsó – túl szép ez ahhoz, hogy igaz legyen... Valóban, a sok előnyért komoly árat kell fizetnünk, ez az ár pedig a (több) nagyságrendnyi romlás a mérés pontosságában. A nagy különbség a pörgettyű és a MEMS-giroszkóp között, hogy míg egy precíz hagyományos pörgettyű esetében a mérési hiba növekedésének sebessége kb. 0,1°/óra, addig a MEMS-giroszkópnál az összegyűlő hiba nagysága több tíz fok is lehet percenként (!), tökéletesen alkalmatlanná téve így azt az önálló abszolút iránymeghatározásra. (Ne legyünk persze demagógok, létezik pontosabb MEMS-giroszkóp is, csak természetesen nem ennyi pénzért.)
Aggodalomra azért semmi ok, nem csak giroszkóppal indultunk a csatába, és még ennek a szerény pontosságnak is nagy hasznát fogjuk venni.
Érdekesség
- A pörgettyűnek van még érdekes tulajdonsága: a francia fizikus, Foucault fedezte fel, hogy ha a három szabadságfokú pörgettyűt megfosztjuk egyik szabadságfokától, és csak vízszintesen engedjük elfordulni, akkor a Föld forgása miatt kialakuló Coriolis-erő a pörgettyűt a Föld forgástengelyével párhuzamosan (egyszerűbben: észak-déli irányba) igyekszik elmozdítani (ez a jelenség a precesszió). A Coriolis-erő viszonylagos gyengesége és a pörgettyű nagy tehetetlenségi nyomatéka miatt a mozgás az északi irány körüli lassan csillapodó ingadozás, de ügyes módszerekkel az irány olyan pontossággal is meghatározható, amely alkalmassá teszi pl. alagutak fúrásának irányítását, amire a klasszikus földmérés (határozzuk meg a helyünket távoli, ismert helyű pontokra végzett szögméréssel) módszerei érthető okokból nem alkalmasak.
- A Coriolis-erő szemléltetésére kiváló példa (szintén Foucault felfedezése), ha felfüggesztünk egy több órán keresztül lengeni képes ingát. Az inga lengésének síkja látszólag lassan forog a felfüggesztés körül, de természetesen a forgást valójában a Föld végzi, az inga síkja mozdulatlan marad.
- Bár a Coriolis-erő több természeti jelenséget is befolyásol (pl. az időjárási ciklonok az óramutató járásával ellentétesen forognak az északi féltekén, és ellenkező irányba a délin), sokan a lefolyóban kialakuló örvény irányát is ennek tudják be. Nincs igazuk, hacsak nem rendelkeznek néhány száz kilométer átmérőjű mosdókagylóval...